¤ňŕľď┤äô(chuĘĄng)╣ĄśI(yĘĘ)┐ěÍĂËđ¤Ů╣ź╦ż╔˙«a(chĘún)Á─čo╣Ž╣Ž┬╩Đa(bĘ│)âöĐbÍ├Ëđú║LPýoÍ╣╩Ż▀M(jĘČn)¤ÓøíóLVP¤Á┴đÎâěô(fĘ┤)Ţd▀M(jĘČn)¤Óø����íóLBBŞ▀ë║čo╣Ž╣Ž┬╩Đa(bĘ│)âöĐbÍ├íóLDBÁ═ë║äËĹB(tĘĄi)čo╣ŽĐa(bĘ│)âöĐbÍ├�íóSVGŞ▀ë║äËĹB(tĘĄi)čo╣ŽĐa(bĘ│)âöĐbÍ├……
čo╣Ž╣Ž┬╩Đa(bĘ│)âöĐbÍ├ď┌ŰŐÎË╣ęŰŐ¤ÁŻy(tĘ»ng)Íđ╦¨│đô˙(dĘín)Á─θË├╩ă╠ߪ▀ŰŐżW(wĘúng)Á─╣Ž┬╩ϲöÁ(shĘ┤)úČŻÁÁ═╣ęŰŐÎâë║ø╝░Ţö╦═żÇ┬ĚÁ─ôp║─���úČ╠ߪ▀╣ęŰŐđž┬╩�����úČŞ─╔Ă╣ęŰŐşh(huĘón)ż│���íú╦¨Ďďčo╣Ž╣Ž┬╩Đa(bĘ│)âöĐbÍ├ď┌ŰŐ┴Ž╣ęŰŐ¤ÁŻy(tĘ»ng)Íđ╠Äď┌Ď╗éÇ(gĘĘ)Ěă│úÍěϬÁ─╬╗Í├�����íú║¤└ÝÁ─▀xô˝Đa(bĘ│)âöĐbÍ├úČ┐╔ĎďÎ÷ÁŻÎţ┤ˇ¤ŮÂ╚Á─ťp╔┘żW(wĘúng)Żj(luĘ░)Á─ôp║─�����úČ╩╣ŰŐżW(wĘúng)┘|(zhĘČ)┴┐╠ߪ▀�íúĚ┤Í«úČ╚š▀xô˝╗˛╩╣Ë├▓╗«ö(dĘíng)���úČ┐╔─▄ďý│╔╣ęŰŐ¤ÁŻy(tĘ»ng)����úČŰŐë║▓ĘäË��úČÍC▓Ęď÷┤ˇÁ╚ÍTÂÓϲ╦ěíú
Ď╗�����íó░┤═ÂăđĚŻ╩ŻĚÍţÉ:1. ĐËĽr(shʬ)═ÂăđĚŻ╩Żú║
ĐËĽr(shʬ)═ÂăđĚŻ╩Ż:╝┤╚╦éâ╩ýĚQÁ─"ýoĹB(tĘĄi)"Đa(bĘ│)âöĚŻ╩Ż�����íú▀@ĚN═ÂăđĎ└┐┐Ë┌鸯y(tĘ»ng)Á─ŻËË|øÁ─äËθ�����úČ«ö(dĘíng)╚╗Ë├Ë┌═ÂăđŰŐ╚ŢÁ─ŻËË|øîúË├Á─���úČ╦Řż▀ËđĎÍÍĂŰŐ╚ŢÁ─Ë┐┴¸Î¸Ë├����úČĐËĽr(shʬ)═ÂăđÁ──┐Á─ď┌Ë┌Ě└Í╣ŻËË|ø▀^Ë┌ţlĚ▒Á─äËθĽr(shʬ)��úČďý│╔ŰŐ╚Ţøôpë─�����úČŞŘÍěϬÁ─╩ăĚ└éńŰŐ╚Ţ▓╗═úÁ─═Âăđîž(dĘúo)Í┬╣ęŰŐ¤ÁŻy(tĘ»ng)Ň˝╩ÄúČ▀@╩ă║▄╬úŰU(xiĘún)Á─���íú«ö(dĘíng)ŰŐżW(wĘúng)Á─ěô(fĘ┤)║╔│╩ŞđđďĽr(shʬ)��úČ╚šŰŐäËÖC(jĘę)���íóŰŐ║ŞÖC(jĘę)Á╚ěô(fĘ┤)ŢdúČ▀@Ľr(shʬ)ŰŐżW(wĘúng)Á─ŰŐ┴¸ť■Äž║ˇŰŐë║Ď╗éÇ(gĘĘ)ŻăÂ╚�����úČ«ö(dĘíng)ěô(fĘ┤)║╔│╩╚ŢđďĽr(shʬ)���úČ╚š▀^┴┐Á─Đa(bĘ│)âöĐbÍ├Á─┐ěÍĂøúČ▀@╩ăŰŐżW(wĘúng)Á─ŰŐ┴¸│Čă░Ë┌ŰŐë║Á─Ď╗éÇ(gĘĘ)ŻăÂ╚�úČ╝┤╣Ž┬╩ϲöÁ(shĘ┤)│Čă░╗˛ť■║ˇ╩ăÍŞŰŐ┴¸┼cŰŐë║Á─¤Ó╬╗ŕP(guĘín)¤Áíú═Ę▀^Đa(bĘ│)âöĐbÍ├Á─┐ěÍĂøÖzťy╣ęŰŐ¤ÁŻy(tĘ»ng)Á─╬´└Ý┴┐�úČüÝŤQÂĘŰŐ╚ŢøÁ─═ÂăđúČ▀@éÇ(gĘĘ)╬´└Ý┴┐┐╔Ďď╩ă╣Ž┬╩ϲöÁ(shĘ┤)╗˛čo╣ŽŰŐ┴¸╗˛čo╣Ž╣Ž┬╩�íú¤┬├Šż═╣Ž┬╩ϲöÁ(shĘ┤)đ═┼e└řŇf├¸íú«ö(dĘíng)▀@éÇ(gĘĘ)╬´└Ý┴┐ŁMÎŃϬ㡼r(shʬ)����úČ╚šcosΦ│Čă░ăĎ>0.98úČť■║ˇăĎ>0.95úČď┌▀@éÇ(gĘĘ)ĚÂç˙â╚(nĘĘi)�����úČ┤╦Ľr(shʬ)┐ěÍĂøŤ]Ëđ┐ěÍĂđ┼╠ľ░l(fĘí)│÷�����úČ▀@Ľr(shʬ)ĎĐ═Â╚ŰÁ─ŰŐ╚ŢøŻM▓╗═╦│÷����úČŤ]═Â╚ŰÁ─ŰŐ╚ŢøŻMĎ▓▓╗═Â╚Űíú«ö(dĘíng)ÖzťyÁŻcosΦ▓╗ŁMÎŃϬ㡼r(shʬ)�úČ╚šcosΦť■║ˇăĎ<0.95úČ─ă├┤îóĎ╗ŻMŰŐ╚Ţø═Â╚Ű����úČ▓ó└^└m(xĘ┤)▒O(jiĘín)ťycosΦ╚š▀Ç▓╗ŁMÎŃϬăˇúČ┐ěÍĂøätĐËĽr(shʬ)Ď╗Â╬Ľr(shʬ)ÚgúĘĐËĽr(shʬ)Ľr(shʬ)Úg┐╔ŇűÂĘ
úę��úČď┘═Â╚ŰĎ╗ŻMŰŐ╚Ţø����úČÍ▒ÁŻ╚ź▓┐═Â╚Ű×ÚÍ╣íú«ö(dĘíng)ÖzťyÁŻ│Čă░đ┼╠ľ╚šcosΦ<0.98,╝┤│╩╚ŢđďŢd║╔Ľr(shʬ)�úČ─ă├┤┐ěÍĂøż═ÍĎ╗ăđ│řŰŐ╚ŢøŻMíúϬνкÁ─ďşätż═╩ăú║¤╚═Â╚ŰÁ──ăŻMŰŐ╚ŢøŻMď┌ăđ│řĽr(shʬ)ż═Ϭ¤╚ăđ│říú╚š╣ű░ĐĐËĽr(shʬ)Ľr(shʬ)ÚgŇűÂĘ×Ú300s�����úČ°▀@╠ÎĐa(bĘ│)âöĐbÍ├Ëđ╩«┬ĚŰŐ╚ŢøŻM����úČ─ă├┤╚ź▓┐═Â╚ŰÁ─Ľr(shʬ)Úgż═×Ú30ĚÍšŐúČăđ│řĎ▓▀@śË�����íúď┌▀@Â╬Ľr(shʬ)Úgâ╚(nĘĘi)čo╣Žôp╩žĐa(bĘ│)Í╗─▄╩ăÍ▓ŻÁŻ╬╗���íú╚š╣űîóĐËĽr(shʬ)Ľr(shʬ)ÚgďO(shĘĘ)ÂĘÁ─║▄Â╠�úČ╗˛Ť]ËđďO(shĘĘ)ÂĘĐËĽr(shʬ)Ľr(shʬ)Úg�úČż═┐╔─▄Ľ■│÷ČF(xiĘĄn)▀@śËÁ─ăÚŤríú«ö(dĘíng)┐ěÍĂø▒O(jiĘín)ťyÁŻcosΦí┤0.95��úČĐŞ╦┘îóŰŐ╚ŢøŻMÍĎ╗═Â╚Ű����úČ°ď┌═Â╚ŰĂ┌Úg���úČ┤╦Ľr(shʬ)ŰŐżW(wĘúng)┐╔─▄ĎĐ╩ă╚Ţđďěô(fĘ┤)Ţd╝┤▀^Đa(bĘ│)âö┴╦�úČ┐ěÍĂøät┐ěÍĂŰŐ╚ŢøŻMÍĎ╗ăđ│řúČÍ▄°Ć═(fĘ┤)╩╝����úČđ╬│╔Ň╩ÄúČîž(dĘúo)Í┬¤ÁŻy(tĘ»ng)▒└Łó�íú╩ăĚ˝─▄đ╬│╔Ň˝╩Ä┼cěô(fĘ┤)ŢdÁ─đď┘|(zhĘČ)Ëđ├▄ăđŕP(guĘín)¤ÁúČ╦¨ĎďŇf▀@éÇ(gĘĘ)ůóöÁ(shĘ┤)đŔĎ¬Ş¨ô■(jĘ┤)ČF(xiĘĄn)ł÷ăÚŤrŇűÂĘ�����úČϬď┌▒úÎC¤ÁŻy(tĘ»ng)░▓╚źÁ─ăÚŤr¤┬���úČď┘┐╝Ĺ]Đa(bĘ│)âöđž╣ű�����íú
2. ╦▓Ľr(shʬ)═ÂăđĚŻ╩ŻĽr(shʬ)═ÂăđĚŻ╩Ż:╝┤╚╦éâ╩ýĚQÁ─"äËĹB(tĘĄi)"Đa(bĘ│)âöĚŻ╩Ż�úČŬ(yĘęng)ďôŇf╦Ř╩ă░Űîž(dĘúo)ˇwŰŐ┴ŽĂ¸╝■┼cöÁ(shĘ┤)ÎÍ╝╝đg(shĘ┤)żC║¤Á─╝╝đg(shĘ┤)ŻY(jiĘŽ)żž�����úČîŹ(shʬ)ŰHż═╩ăĎ╗╠Î┐ý╦┘ŰSäˤÁŻy(tĘ»ng)���úČ┐ěÍĂøĎ╗░Ń─▄ď┌░ŰéÇ(gĘĘ)Í▄▓ĘÍ┴1éÇ(gĘĘ)Í▄▓Ęâ╚(nĘĘi)═ŕ│╔▓╔śË���íóËő(jĘČ)╦Ń�����úČď┌2éÇ(gĘĘ)Í▄Ă┌ÁŻüÝĽr(shʬ)���úČ┐ěÍĂøĎĐŻŤ(jĘęng)░l(fĘí)│÷┐ěÍĂđ┼╠ľ ┴╦íú═Ę▀^├}Ť_đ┼╠ľ╩╣żžÚl╣▄îž(dĘúo)═Ę�����úČ═ÂăđŰŐ╚ŢøŻM┤ˇ╝s20-30║┴├Űâ╚(nĘĘi)ż══ŕ│╔Ď╗éÇ(gĘĘ)╚ź▓┐äËθ�����úČ▀@ĚN┐ěÍĂĚŻ╩Ż╩ăÖC(jĘę)đÁäËθÁ─ŻËË|øţÉčoĚĘîŹ(shʬ)ČF(xiĘĄn)Á─����íúäËĹB(tĘĄi)Đa(bĘ│)âöĚŻ╩ŻÎ¸×Úđ┬Ď╗┤˙Á─Đa(bĘ│)âöĐbÍ├ËđÍ°ĆVĚ║Á─Ŭ(yĘęng)Ë├ă░ż░íúČF(xiĘĄn)ď┌║▄ÂÓÚ_ŕP(guĘín)đđśI(yĘĘ)ĆSÂ╝ďçłD╔˙«a(chĘún)�����íóÍĂďý▀@ţÉĐbÍ├ăĎËđÁ─╔˙«a(chĘún)ĆSĎĐŻŤ(jĘęng)╔˙«a(chĘún)│÷║▄▓╗ňeÁ─ĐbÍ├���íú«ö(dĘíng)╚╗┼cç°═Ô═ČţÉ«a(chĘún)Ă̤Ó▒╚Ć─đď─▄╔¤����íóď¬Ă¸╝■Á─┘|(zhĘČ)┴┐����íó«a(chĘún)ĂĚŻY(jiĘŽ)śő(gĘ░u)╔¤▀ÇËđĎ╗ÂĘÁ─▓ţżÓíú
äËĹB(tĘĄi)Đa(bĘ│)âö?shĘ┤)─żÇ┬ĚĚŻ╩Żú║
(1)LC┤«ŻËĚĘ:▀@ĚNĚŻ╩Ż▓╔Ë├ŰŐŞđ┼cŰŐ╚ŢÁ─┤«┬ô(liĘón)ŻËĚĘ��úČŇ{(diĘĄo)╣Ł(jiĘŽ)ŰŐ┐╣Ďď▀_(dĘó)ÁŻĐa(bĘ│)âöčo╣Žôp║─Á──┐Á─�íúĆ─ďş└Ý╔¤ĚÍ╬÷úČ▀@ĚNĚŻ╩ŻÝĹŬ(yĘęng)╦┘Â╚┐ý�úČÚ]şh(huĘón)╩╣Ë├Ľr(shʬ)úČ┐╔Î÷ÁŻčo▓ţŇ{(diĘĄo)╣Ł(jiĘŽ)����úČ╩╣čo╣Žôp║─ŻÁ×Ú┴ŃíúĆ─ď¬╝■Á─▀xô˝╔¤üÝŇf����úČŞ¨ô■(jĘ┤)Đa(bĘ│)âö┴┐▀xô˝1ŻMŰŐ╚Ţø╝┤┐╔úČ▓╗đŔϬď┘ĚÍ│╔ÂÓ┬Ě���íú╝╚╚╗Ëđ▀@├┤ÂÓÁ─â×(yĘşu)Řc(diĘún)��úČŬ(yĘęng)ďô╩ăĚă│ú└ݤŰÁ─Đa(bĘ│)âöĐbÍ├┴╦�����íúÁźË╔Ë┌Ϭăˇ▀xË├Á─ŰŐŞđ┴┐ÍÁ┤ˇ�úČϬď┌║▄┤ˇÁ─äËĹB(tĘĄi)ĚÂç˙â╚(nĘĘi)Ň{(diĘĄo)╣Ł(jiĘŽ)úČ╦¨ĎďˇwĚeĎ▓¤ÓîŽŢ^┤ˇ�����úČâr(jiĘĄ)Ş˝Ď▓ϬŞ▀Ď╗đę�úČď┘╝ËĎ╗đę╝╝đg(shĘ┤)Á─ďşĎ˛úČ▀@ÝŚ(xiĘĄng)╝╝đg(shĘ┤)ÁŻ─┐ă░üÝŇf▀ÇŤ]Ëđ▒╗ĆVĚ║▓╔Ë├╗˛╩╣Ë├║▄╔┘�íú
(2)▓╔Ë├ŰŐ┴Ž░Űîž(dĘúo)ˇwø╝■θ×ÚŰŐ╚ŢøŻMÁ─═ÂăđÚ_ŕP(guĘín)úČθ×ÚĐa(bĘ│)âöĐbÍ├╦¨▓╔Ë├Á─░Űîž(dĘúo)ˇwø╝■Ď╗░ŃÂ╝▓╔Ë├żžÚl╣▄���úČĂńâ×(yĘşu)Řc(diĘún)╩ă▀x▓─ĚŻ▒Ń��úČŰŐ┬Ě│╔╩ýËÍ║▄ŻŤ(jĘęng)Ł˙(jĘČ)�����íúĂń▓╗ÎŃÍ«╠Ä╩ăď¬╝■▒ż╔Ý▓╗─▄┐ý╦┘ŕP(guĘín)öÓ�úČď┌ĎÔ═ÔăÚŤr¤┬╚ŢĎÎčřÜžúČ╦¨Ďď▒úÎo(hĘ┤)┤Ű╩ęϬ═ŕ╔Ă����íú«ö(dĘíng)ŻÔŤQ┴╦▒úÎo(hĘ┤)ćľţ}�úČθ×ÚŰŐ╚ŢøŻM═ÂăđÚ_ŕP(guĘín)Ŭ(yĘęng)ďô╩ăŢ^×Ú└ݤŰÁ─ø╝■íúäËĹB(tĘĄi)Đa(bĘ│)âö?shĘ┤)─Đa(bĘ│)âöđž╣ű▀ÇϬ┐┤┐ěÍĂø╩ăĚ˝ËđŢ^Ş▀Á─đď─▄╝░ůóöÁ(shĘ┤)�����íú║▄ÍěϬÁ─Ď╗ÝŚ(xiĘĄng)ż═╩ăϬăˇ┐ěÍĂøϬËđ┴╝║├Á─äËĹB(tĘĄi)ÝĹŬ(yĘęng)Ľr(shʬ)Úg����úČť╩(zhĘ│n)┤_Á─═Âăđ╣Ž┬╩úČ▀ÇϬËđŢ^Ş▀Á─ÎďÎRäe─▄┴Ž�����úČ▀@śË▓┼─▄▀_(dĘó)ÁŻÎţ╝ĐÁ─Đa(bĘ│)âöđž╣ű���íú«ö(dĘíng)┐ěÍĂø▓╔╝»ÁŻđŔϬĐa(bĘ│)âö?shĘ┤)─đ┼╠ľ░l(fĘí)│÷Ď╗éÇ(gĘĘ)ÍŞ┴ţúĘ═Â╚ŰĎ╗ŻM╗˛ÂÓŻMŰŐ╚ŢøÁ─ÍŞ┴ţúę�úČ┤╦Ľr(shʬ)Ë╔Ë|░l(fĘí)├}Ť_╚ąË|░l(fĘí)żžÚl╣▄îž(dĘúo)═Ę���úȤÓŬ(yĘęng)Á─ŰŐ╚ŢøŻMĎ▓ż═▓ó╚╦żÇ┬Ě▀\(yĘ┤n)đđ�íú đŔϬĆŐ(qiĘóng)Ň{(diĘĄo)Á─╩ăżžÚl╣▄îž(dĘúo)═ĘÁ─Śl╝■▒ěÝÜŁMÎŃĂń╦¨ď┌¤ÓÁ─ŰŐ╚ŢøÁ─Â╦ŰŐë║×Ú┴ŃúČĎď▒▄├ÔË┐┴¸ďý│╔ď¬╝■Á─ôpë─��úČ░Űîž(dĘúo)ˇwø╝■Ŭ(yĘęng)ďô╩ăčoË┐┴¸═Âăđ���íú«ö(dĘíng)┐ěÍĂÍŞ┴ţ│̤űĽr(shʬ)���úČË|░l(fĘí)├}Ť_ŰS╝┤¤ű╩žúČżžÚl╣▄┴ŃŰŐ┴¸Îď╚╗ŕP(guĘín)öÓ��íúŕP(guĘín)öÓ║ˇÁ─ŰŐ╚ŢøŰŐë║×ÚżÇ┬ĚŰŐë║Ż╗┴¸ĚňÍÁ��úČ▒ěÝÜË╔Ě┼ŰŐŰŐÎŔ▒M┐ýĚ┼ŰŐ�úČĎďéńŰŐ╚Ţøď┘┤╬═Â╚Űíúď¬Ă¸╝■┐╔Ďď▀xć╬ÝŚ(xiĘĄng)żžÚl╣▄Ě┤▓ó┬ô(liĘón)╗˛╩ăŰp¤˛żžÚl╣▄����úČĎ▓┐╔
▀x▀m║¤╚Ţđďěô(fĘ┤)ŢdÁ─╣╠ ĹB(tĘĄi)ŻËË|øúČ▀@śË┐╔Ďď╩í╚ą▀^┴ŃË|░l(fĘí)Á─├}Ť_ŰŐ┬Ě�����úČĆ─°║ć╗»żÇ┬Ě���úČď¬╝■Á──═ë║╝░ŰŐ ┴¸Ď¬║¤└Ý▀xô˝����úČ╔óčßø╝░└ńůsĚŻ╩ŻĎ▓Ϭ┐╝Ĺ]Í▄╚źíú
3.╗ý║¤═ÂăđĚŻ╩Żú║îŹ(shʬ)ŰH╔¤ż═╩ăýoĹB(tĘĄi)┼cäËĹB(tĘĄi)Đa(bĘ│)âö?shĘ┤)─╗ý║¤��úČĎ╗▓┐ĚÍŰŐ╚ŢøŻM╩╣Ë├ŻËË|ø═Âăđ�úČ°┴ÝĎ╗▓┐ĚÍŰŐ╚ŢøŻM╩╣Ë├ŰŐ┴Ž░Űîž(dĘúo)ˇwø╝■���íú▀@ĚNĚŻ╩Żď┌Ď╗ÂĘ│╠Â╚╔¤┐╔Î÷ÁŻâ×(yĘşu)äŢ╗ąĐa(bĘ│)����úČÁźż═Ăń┐ěÍĂ╝╝đg(shĘ┤)�úČ─┐ă░▀ÇĎŐÁŻ═ŕ╔ĂÁ─┐ěÍĂ▄Ť╝■úČďôĚŻ╩ŻË├Ë┌═Ę│úÁ─żW(wĘúng)Żj(luĘ░)╚š╣ĄÁV�íó đíů^(qĘ▒)íó˲żW(wĘúng)Ş─ďý���úČ▒╚Ăć╬Ď╗Á─═ÂăđĚŻ╩Ż═ěîĺ┴╦Ŭ(yĘęng)Ë├ĚÂç˙����úČ╣Ł(jiĘŽ)─▄đž╣űŞŘ║├���íúĐa(bĘ│)âöĐb Í├▀xô˝ĚăÁ╚╚ŢŰŐ╚ŢøŻM�úČ▀@ĚNĚŻ╩ŻĐa(bĘ│)âöđž╣űŞŘ╝Ë╝Ü(xĘČ)Í┬úČŞŘ×Ú└ݤŰ��íú▀Ç┐╔▓╔Ë├ĚͤÓĐa(bĘ│)âöĚŻ╩Ż����úČ┐╔ĎďŻÔŤQË╔Ë┌żÇ┬Ě╚ř¤Ó▓╗ĂŻđđďý│╔Á─ôp╩žíú4. ď┌čo╣Ž╣Ž┬╩Đa(bĘ│)âöĐbÍ├Á─Ŭ(yĘęng)Ë├ĚŻ├Š��úČ▀xô˝─ăĎ╗ĚNĐa(bĘ│)âöĚŻ╩Ż�����úČ▀ÇϬĎ└ŰŐżW(wĘúng)Á─áţŤr°ÂĘ�úČ╩Τ╚îŽ╦¨Đa(bĘ│)âö?shĘ┤)─żÇ┬ĚϬËđ╦¨┴╦ŻÔúČîŽË┌ěô(fĘ┤)║╔Ţ^┤ˇăĎÎâ╗»Ţ^┐ýÁ─╣ĄŤr�����úČ ŰŐ║ŞÖC(jĘę)����íóŰŐäËÖC(jĘę)Á─żÇ┬Ě▓╔Ë├äËĹB(tĘĄi)Đa(bĘ│)âöúČ╣Ł(jiĘŽ)─▄đž╣ű├¸´@����íúîŽË┌ěô(fĘ┤)║╔¤ÓîŽĂŻĚÇ(wĘžn)Á─żÇ┬Ě Ĺ¬(yĘęng)▓╔Ë├ýoĹB(tĘĄi)Đa(bĘ│)âöĚŻ╩Ż�����úČĎ▓┐╔╩╣Ë├äËĹB(tĘĄi)Đa(bĘ│)âöĐbÍ├�����íúîŽË┌Ď╗đę╠ě╩ÔÁ─╣ĄÎ¸şh(huĘón)ż│ż═Ϭ╔¸ Íě▀xô˝Đa(bĘ│)âöĚŻ╩Ż����úČË╚ĂńżÇ┬ĚÍđ║ČËđ╦▓ÎâŞ▀ŰŐë║�íó┤ˇŰŐ┴¸Ť_ô˘Á─ł÷║¤╩ă▓╗─▄▓╔Ë├äË ĹB(tĘĄi)Đa(bĘ│)âö?shĘ┤)─����íúĎ╗░ŃŰŐ║Ş╣ĄÎ¸Ľr(shʬ)Úgż¨ď┌ÄÎ├ŰšŐĎď╔¤úČŰŐäËÖC(jĘę)ćóäËĎ▓ď┌ÄÎ├ŰšŐĎď╔¤�úČ° äËĹB(tĘĄi)Đa(bĘ│)âö?shĘ┤)─ÝĹĹ?yĘęng)Ľr(shʬ)Úgď┌ÄÎ╩«║┴├ŰúČ░┤40║┴├Ű┐╝Ĺ]ätĆ─40║┴├ŰÁŻ5├ŰšŐÍ«â╚(nĘĘi)╩ăĎ╗ éÇ(gĘĘ)¤ÓîŽÁ─ĚÇ(wĘžn)ĹB(tĘĄi)▀^│╠�����úČäËĹB(tĘĄi)Đa(bĘ│)âöĐbÍ├─▄═ŕ│╔▀@éÇ(gĘĘ)▀^│╠�����íú╚š╣űżÇ┬ĚÍđŤ]Ëđ│÷ČF(xiĘĄn)▀@├┤Ď╗Â╬¤ÓîŽÁ─ĚÇ(wĘžn)ĹB(tĘĄi)▀^│╠▓ó─▄┴┐ËÍËđŢ^┤ˇÁ─Îâ╗»úČ╬Ďéâ░Đ╦ŘĚQ×Ú╦▓Îâ╗˛ÚWÎâ�úČ▓╔Ë├äËĹB(tĘĄi) Đa(bĘ│)âöż═Ϭ│÷ćľţ}▓ó┐╔─▄Ďř░l(fĘí)╩┬╣╩íú
Â■��íóčo╣Ž╣Ž┬╩Đa(bĘ│)âö┐ěÍĂø
čo╣Ž╣Ž┬╩Đa(bĘ│)âö┐ěÍĂøËđ╚řĚN▓╔śËĚŻ╩Ż�úČ╣Ž┬╩ϲöÁ(shĘ┤)đ═íóčo╣Ž╣Ž┬╩đ═���íóčo╣ŽŰŐ┴¸đ═��íú▀xô˝─ăĎ╗ĚN╬´└Ý┐ěÍĂĚŻ╩ŻîŹ(shʬ)ŰH╔¤ż═╩ăîŽčo╣Ž╣Ž┬╩Đa(bĘ│)âö┐ěÍĂøÁ─▀xô˝�í����ú┐ěÍĂø╩ăčo╣ŽĐa(bĘ│)âöĐbÍ├Á─ÍŞô]¤ÁŻy(tĘ»ng)úČ▓╔śË���íó▀\(yĘ┤n)╦Ń�����íó░l(fĘí)│÷═Âăđđ┼╠ľ���úČůóöÁ(shĘ┤)ďO(shĘĘ)ÂĘ�íóťy┴┐�����íóď¬╝■▒úÎo(hĘ┤)Á╚╣Ž─▄ż¨Ë╔Đa(bĘ│)âö┐ěÍĂø═ŕ│╔���íú╩«ÄÎ─ŕüÝŻŤ(jĘęng)Üv┴╦Ë╔ĚÍ┴óď¬╝■--╝»│╔żÇ┬Ě-- ć╬ĂČÖC(jĘę)--DSPđżĂČĎ╗éÇ(gĘĘ)┐ý╦┘░l(fĘí)Ň╣Á─▀^│╠����úČĂń╣Ž─▄Ď▓Ë˙╝Ë═ŕ╔Ă��íúż═ç°â╚(nĘĘi)Á─┐éˇwáţŤr��úČË╔Ë┌╩đł÷Á─đŔăˇ┴┐║▄┤ˇ���úČ╔˙«a(chĘún)ĆS╝ĎĎ▓Ë˙üÝË˙ÂÓúČĂńđď─▄╝░â╚(nĘĘi)ď┌┘|(zhĘČ)┴┐▓ţ«É║▄┤ˇ���úČ║▄ÂÓ«a(chĘún)ĂĚ├ű▓╗ĚűîŹ(shʬ)��úČď┌▀xË├Ľr(shʬ)đŔŇJ(rĘĘn)ŇŠîŽ┤ř��íúď┌▀xË├Ľr(shʬ)đŔϬÎóĎÔÁ─┴ÝĎ╗éÇ(gĘĘ)ćľţ}ż═╩ăç°â╚(nĘĘi)╔˙«a(chĘún)Á─┐ěÍĂøĂń├űĚQż¨×Ú"XXXčo╣Ž╣Ž┬╩Đa(bĘ│)âö┐ěÍĂø"����úČ├űĚQ└´│÷ČF(xiĘĄn)Á─"čo╣Ž╣Ž ┬╩"Á─║Č┴x▓╗╩ă▀@┼_┐ěÍĂøÁ─▓╔śË╬´└Ý┴┐íú▓╔śË╬´└Ý┴┐╚íŤQË┌«a(chĘún)ĂĚÁ─đ═╠ľ�úČ°▓╗╩ă«a(chĘún)ĂĚÁ─├űĚQíú
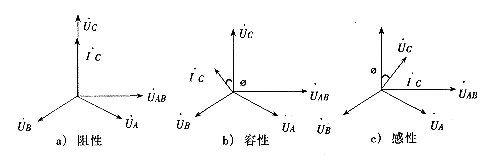
1.╣Ž┬╩ϲöÁ(shĘ┤)đ═┐ěÍĂøÁ─╣Ž┬╩ϲöÁ(shĘ┤)Ë├cosΦ▒Ý╩ż�úČ╦Ř▒Ý╩żËđ╣Ž╣Ž┬╩ď┌żÇ┬ĚÍđ╦¨Ň╝Á─▒╚└říú«ö(dĘíng)cosΦ=1 Ľr(shʬ)����úČżÇ┬ĚÍđŤ]Ëđčo╣Žôp║─íú╠ߪ▀╣Ž┬╩ϲöÁ(shĘ┤)Ďďťp╔┘čo╣Žôp║─╩ă▀@ţÉ┐ěÍĂøÁ─ÎţŻK─┐ś╦(biĘío)����íú▀@ĚN┐ěÍĂĚŻ╩ŻĎ▓╩ă║▄鸯y(tĘ»ng)Á─ĚŻ╩ŻúČ▓╔śË��íó┐ěÍĂĎ▓Â╝Ţ^╚ŢĎÎîŹ(shʬ)ČF(xiĘĄn)"ĐËĽr(shʬ)"ŇűÂĘ��úČ═ÂăđÁ─ĐËĽr(shʬ)Ľr(shʬ)Úg���úČŬ(yĘęng)ď┌10s-120sĚÂç˙â╚(nĘĘi)Ň{(diĘĄo)╣Ł(jiĘŽ) "ý`├˘Â╚"ŇűÂĘ���úČŰŐ┴¸ý`├˘Â╚�����úČ▓╗┤ˇË┌0-2A �����íú═Â╚Ű╝░ăđ│řÚT¤ŮŇűÂĘ���úČĂń╣Ž┬╩ϲöÁ(shĘ┤)Ŭ(yĘęng)─▄ď┌0.85úĘť■║ˇúę-0.95úĘ│Čă░úęĚ ç˙â╚(nĘĘi)ŇűÂĘíú▀^ë║▒úÎo(hĘ┤)ďO(shĘĘ)┴┐��íó´@╩żďO(shĘĘ)Í├�íóĐşşh(huĘón)═ÂăđÁ╚╣Ž─▄úČ▀@ĚN▓╔śËĚŻ╩Żď┌▀\(yĘ┤n)đđÍđ╝╚Ϭ▒úÎCżÇ┬̤ÁŻy(tĘ»ng)ĚÇ(wĘžn)ÂĘ����íóčoŇ˝╩ÄČF(xiĘĄn)¤ˇ│÷ČF(xiĘĄn)úČËÍϬ╝ŠţÖ Đa(bĘ│)âöđž╣ű����úČ▀@╩ăĎ╗îŽ├ČÂ▄����úČÍ╗─▄ď┌ČF(xiĘĄn)ł÷ĎĽż▀ˇwăÚŤrîóůóöÁ(shĘ┤)ŇűÂĘď┌Ţ^║├Á─áţĹB(tĘĄi)¤┬╣Ą θ�����íú╝┤╩╣Ň{(diĘĄo)ŇűÁ─Ţ^║├����úČĎ▓čoĚĘÂ[Đa(bĘ│)▀@ĚNĚŻ╩Ż▒ż╔ÝÁ─╚▒¤Ţ�����úČË╚Ăń╩ăď┌żÇ┬ĚÍěěô(fĘ┤)║╔Ľr(shʬ)�����íú ┼e└řŇf├¸ú║ďO(shĘĘ)ÂĘ═Â╚ŰÚT¤Ů��ú╗cosΦ=0.95úĘť■║ˇúę┤╦Ľr(shʬ)żÇ┬ĚÍěŢd║╔���úČ╝┤╩╣┤╦Ľr(shʬ)Á─čo╣Žôp║─ĎĐ║▄┤ˇ���úČď┘═ÂŰŐ╚ŢøŻMĎ▓▓╗Ľ■│÷ČF(xiĘĄn)▀^Đa(bĘ│)âöúČÁźcosΦÍ╗Ϭ▓╗đíË┌0.95�úČ┐ěÍĂøż═▓╗Ľ■ď┘ËđĐa(bĘ│)âöÍŞ┴ţúČĎ▓ż═▓╗Ľ■ËđŰŐ╚ŢøŻM═Â╚Ű���úČ╦¨Ďď▀@ĚN┐ěÍĂĚŻ╩ŻŻĘÎh ▓╗Î÷×Ú═Ă╦]Á─ĚŻ╩Ż���íú
2. čo╣Ž╣Ž┬╩úĘčo╣ŽŰŐ┴¸úęđ═┐ěÍĂø čo╣Ž╣Ž┬╩úĘčo╣ŽŰŐ┴¸úęđ═Á─┐ěÍĂøŢ^═ŕ╔ĂÁ─ŻÔŤQ┴╦╣Ž┬╩ϲöÁ(shĘ┤)đ═Á─╚▒¤Ţ���íúĎ╗éÇ(gĘĘ) ďO(shĘĘ)Ëő(jĘČ)┴╝║├Á─čo╣Žđ═┐ěÍĂø╩ăÍă─▄╗»Á─úČËđ║▄ĆŐ(qiĘóng)Á─▀mŬ(yĘęng)─▄┴Ž����úČ─▄╝ŠţÖżÇ┬ĚÁ─ĚÇ(wĘžn)ÂĘđď╝░Özťy╝░Đa(bĘ│)âöđž╣űúČ▓ó─▄îŽĐa(bĘ│)âöĐbÍ├▀M(jĘČn)đđ═ŕ╔ĂÁ─▒úÎo(hĘ┤)╝░Özťy�����úČ▀@ţÉ┐ěÍĂøĎ╗░ŃÂ╝ ż▀ËđĎď¤┬╣Ž─▄ú║╦─¤ˇ¤Ů▓┘θ�íóÎďäËíó╩ÍäËăđôQ���íóÎďÎRäe޸┬ĚŰŐ╚ŢøŻMÁ─╣Ž┬╩��íóިô■(jĘ┤)ěô(fĘ┤)ŢdÎď äËŇ{(diĘĄo)╣Ł(jiĘŽ)ăđôQĽr(shʬ)Úg���íóÍC▓Ę▀^ë║łˇ(bĘĄo)ż»╝░▒úÎo(hĘ┤)����íóżÇ┬ĚÍCŇ˝łˇ(bĘĄo)ż»�íó▀^ŰŐë║▒úÎo(hĘ┤)���íóżÇ┬ĚÁ═ŰŐ ┴¸łˇ(bĘĄo)ż»����íóŰŐë║���íóŰŐ┴¸╗űÎâ┬╩ťy┴┐�����íó´@╩żŰŐ╚Ţø╣Ž┬╩����íó´@╩żcosΦ�íóUíóI��íóS���íóP����íó Q╝░ţl┬╩íúË╔Ďď╔¤╣Ž─▄ż═┐╔Ďď┐┤│÷Ăń┐ěÍĂ╣Ž─▄Á─═ŕéń��úČË╔Ë┌╩ăčo╣Žđ═Á─┐ěÍĂø��úČĎ▓ż═îó Đa(bĘ│)âöĐbÍ├Á─đž╣ű░l(fĘí)ô]Á├┴▄└ý▒MÍ┬��íú╚šżÇ┬Ěď┌Íěěô(fĘ┤)║╔Ľr(shʬ)�úČ─ă┼┬cosΦĎĐ▀_(dĘó)ÁŻ0.99 úĘť■║ˇúęúČÍ╗Ϭď┘═ÂĎ╗ŻMŰŐ╚Ţø▓╗░l(fĘí)╔˙▀^Đa(bĘ│)����úČĎ▓▀ÇĽ■ď┘═Â╚ŰĎ╗ŻMŰŐ╚ŢøúČ╩╣Đa(bĘ│)âöđž╣ű▀_(dĘó)ÁŻÎţ╝ĐÁ─áţĹB(tĘĄi)����íú▓╔Ë├DSPđżĂČÁ─┐ěÍĂøúČ▀\(yĘ┤n)╦Ń╦┘Â╚┤ˇĚ¨Â╚╠ߪ▀�úČ╩╣Á├Ş╗└´╚~ÎâôQÁ├ÁŻîŹ(shʬ)ČF(xiĘĄn)íú«ö(dĘíng)╚╗����úČ▓╗╩ă╦¨ËđÁ─čo╣Žđ═┐ěÍĂøÂ╝Ëđ▀@├┤═ŕéńÁ─╣Ž─▄����íúç°â╚(nĘĘi)Á─«a(chĘún)Ă̤ÓîŽË┌ç°═ÔÁ─«a(chĘún)ĂĚ▀Ç┤Šď┌Ď╗ÂĘÁ─▓ţżÓ��íú
3. Ë├Ë┌äËĹB(tĘĄi)Đa(bĘ│)âö?shĘ┤)─┐ěÍĂøîŽË┌▀@ĚN┐ěÍĂøϬ㡿═ŞŘŞ▀┴╦��úČĎ╗░Ń╩ă┼cË|░l(fĘí)├}Ť_đ╬│╔ŰŐ┬ĚĎ╗▓ó┐╝Ĺ]Á─��úČϬăˇ┐ěÍĂø┐╣Ş╔ö_─▄┴ŽĆŐ(qiĘóng)�úČ▀\(yĘ┤n)╦Ń╦┘Â╚┐ý����úČŞŘÍěϬÁ─╩ăËđ║▄║├Á─═ŕ│╔äËĹB(tĘĄi)Đa(bĘ│)âö╣Ž─▄íúË╔Ë┌▀@ţÉ┐ěÍĂøĎ▓Â╝╗¨Ë┌čo╣Žđ═�úČ╦¨Ďď╦Řż▀éńýoĹB(tĘĄi)čo╣Žđ═Á─╠ěŘc(diĘún)íú─┐ă░�����úČç°â╚(nĘĘi)Ë├Ë┌äËĹB(tĘĄi)Đa(bĘ│)âö?shĘ┤)─┐ěÍĂø���úČ┼cç°═Ô═ČţÉ«a(chĘún)Ă̤Ó▒╚ËđŢ^┤ˇÁ─▓ţżÓ��úČĎ╗╩ăď┌äËĹB(tĘĄi)ÝĹŬ(yĘęng)Ľr(shʬ)Úg╔¤Ţ^┬ř��úČäËĹB(tĘĄi)ÝĹŬ(yĘęng)Ľr(shʬ)ÚgÍěĆ═(fĘ┤)đď▓╗║├�����íúÂ■╩ăĐa(bĘ│)âö╣Ž┬╩▓╗─▄Ď╗▓ŻÁŻ╬╗�úČ▀@đęŬ(yĘęng)╩ă╔˙«a(chĘún)ĆS╝ĎϬÍěŘc(diĘún)ŻÔŤQÁ─ćľţ}íú┴Ý═Ô�����úȤÓŬ(yĘęng)Á─ç°╝Ďś╦(biĘío)ť╩(zhĘ│n)Ď▓╔đ╬┤ĎŐÁŻ���úČ▀@ĚŻ├Š┬ń║ˇË┌░l(fĘí)Ň╣����íú
╚ř����íó×V▓ĘĐa(bĘ│)âö¤ÁŻy(tĘ»ng)Ë╔Ë┌ČF(xiĘĄn)┤˙░Űîž(dĘúo)ˇwø╝■Ŭ(yĘęng)Ë├Ë˙üÝË˙ĂŇ▒ÚúČ╣Ž┬╩Ď▓ŞŘ┤ˇ�����úČÁź╦ŘÁ─ěô(fĘ┤)├ŠË░ÝĹż═╩ă«a(chĘún)╔˙║▄┤ˇÁ─ĚăŇř¤ĎŰŐ┴¸��íú╩╣ŰŐżW(wĘúng)Á─ÍC▓ĘŰŐë║╔řŞ▀úČ╗űÎâ┬╩ď÷┤ˇ�����úČŰŐżW(wĘúng)╣ęŰŐ┘|(zhĘČ)┴┐Îâë─��íú╚š╣ű╣ęŰŐżÇ┬Ě╔¤ËđŢ^┤ˇÁ─ÍC▓ĘŰŐë║��úČË╚Ăń5┤╬Ďď╔¤����úČ▀@đęÍC▓Ęîó▒╗Đa(bĘ│)âöĐbÍ├Ě┼┤ˇ����íúŰŐ╚ŢøŻM┼cżÇ┬Ě┤«┬ô(liĘón)ÍCŇ˝úČ
╩╣żÇ┬Ě╔¤Á─ŰŐë║�íóŰŐ┴¸╗űÎâ┬╩ď÷┤ˇúČ▀ÇËđ┐╔─▄ ďý│╔ďO(shĘĘ)éńôpë─�����úČď┘▀@ĚNăÚŤr¤┬Đa(bĘ│)âöĐbÍ├╩ă▓╗┐╔╩╣Ë├Á─�íúÎţ║├Á─ŻÔŤQĚŻĚĘż═╩ăď┌ŰŐ╚ŢøŻM┤«ŻËŰŐ┐╣øüÝŻM│╔ÍC▓Ę×V▓Ęøíú×V▓ĘøÁ─ďO(shĘĘ)Ëő(jĘČ)Ϭ╩╣ď┌╣ĄţlăÚŤr¤┬│╩╚Ţđď���úČĎďÇ┬Ě▀M(jĘČn)đđčo╣ŽĐa(bĘ│)âö�����úČîŽË┌ÍC▓Ęät×ÚŞđđďěô(fĘ┤)Ţd��úČĎď╬Ř╩Ň▓┐ĚÍÍC▓ĘŰŐ┴¸�úČŞ─╔ĂżÇ ┬ĚÁ─╗űÎâ┬╩íúď÷╝ËŰŐ┐╣ø║ˇ����úČϬ┐╝Ĺ]ŰŐ╚ŢÂ╦ŰŐë║╔řŞ▀Á─ćľţ}íú×V▓ĘĐa(bĘ│)âöĐbÍ├╝┤Đa(bĘ│)âö┴╦čo╣Žôp║─ËÍŞ─╔Ă┴╦żÇ┬Ě┘|(zhĘČ)┴┐�����úČŰm╚╗│╔▒ż╠ߪ▀Ţ^ÂÓ�úČÁź îŽË┌ÍC▓Ę│╔ĚÍŢ^┤ˇÁ─żÇ┬Ě▀Ç╩ăŬ(yĘęng)▒M┴┐┐╝Ĺ]▓╔Ë├úČ▓╗─▄ŇJ(rĘĘn)×ÚĐbÍ├Ď╗Ľr(shʬ)▓╗│÷ćľţ}ż═ŇJ(rĘĘn)×ÚŤ]Ëđćľţ}┤Šď┌���íú║▄ÂÓăÚŤr¤┬��úČ▓╔Ë├╬ň┤╬�íóĂ▀┤╬��íó╩«Ď╗┤╬╗˛Ş▀═Ę×V▓Ęø┐╔Ďďď┌Đa(bĘ│)âöčo╣Ž╣Ž┬╩Á─═ČĽr(shʬ)úČÁŻy(tĘ»ng)ÍđÁ─ÍC▓Ę▀M(jĘČn)đđ¤ű│ř�íú
¤ňŕľď┤äô(chuĘĄng)╣ĄśI(yĘĘ)┐ěÍĂËđ¤Ů╣ź╦ż╔˙«a(chĘún)Á─čo╣Ž╣Ž┬╩Đa(bĘ│)âöĐbÍ├Ëđú║LPýoÍ╣╩Ż▀M(jĘČn)¤ÓøíóLVP¤Á┴đÎâěô(fĘ┤)Ţd▀M(jĘČn)¤Óø���íóLBBŞ▀ë║čo╣Ž╣Ž┬╩Đa(bĘ│)âöĐbÍ├���íóLDBÁ═ë║äËĹB(tĘĄi)čo╣ŽĐa(bĘ│)âöĐbÍ├íóSVGŞ▀ë║äËĹB(tĘĄi)čo╣ŽĐa(bĘ│)âöĐbÍ├……
TAGú║Á═ë║,čo╣Ž╣Ž┬╩,Đa(bĘ│)âö,ĐbÍ├,ďş└Ý,▀xđ═,¤ňŕľ,ď┤äô(chuĘĄng),╣ĄśI(yĘĘ)┐ěÍĂ
ÁěÍĚú║
http://www.iyuoxtl.cn/xinwendongtai/xingyexinwen/490.html ŮD(zhuĘún)ŢdŇłÎó├¸│÷╠Ä!(ěč(zĘŽ)╚╬żÄŢőú║¤ňŕľď┤äô(chuĘĄng)ŰŐÜÔ)